|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Результаты измерений тока и напряжения. Номер опыта l Dl I DI U DU R DR sR ⇐ ПредыдущаяСтр 2 из 2
Порядок обработки результатов следующий: 1) по результатам измерений диаметра проволоки рассчитать среднее значение 2) используя полученные данные для тока и напряжения, вычислить значения сопротивлений R. Среднее значение R не вычислять, так как это не имеет физического смысла; 3) вычислить погрешности косвенного измерения сопротивления DR и sR по формулам (5) и (6) для какого-либо одного значения R. Считать, что sI = DI и sU = DU; 4) построить график зависимости R = f(l). Экспериментальные точки нанести на координатную плоскость, откладывая по оси х величину l, а по оси у соответствующее ей значение сопротивления R. Для каждой точки указать погрешности Dl и DR. Для этого каждую точку изобразить как пересечение двух отрезков длиной 2Dl вдоль оси х и 2DR вдоль оси у с центрами, соответствующими измеренным значениям; 5) определить графически среднее значение удельного сопротивления
где 6) вычислить погрешности Dr и sr результатов косвенного определения удельного сопротивления, используя формулы (7) и (8) соответственно. В этих формулах в качестве I и U использовать значения какого-либо одного измерения (при определенном значении длины 7) результаты измерения удельного сопротивления представить в виде
Контрольные вопросы
1. Какие измерения называют прямыми? 2. Чему равна абсолютная, относительная и средняя квадратическая ошибки прямых измерений? 3. Какие измерения называют косвенными? 4. Чему равна максимальная абсолютная, относительная и средняя квадратическая ошибки косвенных измерений? 5. Как определить погрешности, вносимые различными измерительными приборами? 6. Что такое класс точности прибора?
Работа 2. ЭКВИВАЛЕНТНОСТЬ ГРАВИТАЦИОННОЙ И ИНЕРТНОЙ МАСС
Цель работы – изучить законы равноускоренного движения, динамики поступательного движения связанных тел; определить ускорение свободного падения тел различной массы.
Общие сведения
Масса – одна из основных характеристик материи, являющаяся мерой ее инертных и гравитационных свойств. Инертная масса фигурирует во втором законе динамики. Гравитационная масса характеризует силу, с которой тела притягиваются друг к другу, и представлена в законе всемирного тяготения. Ответ на вопрос, различаются ли инертная и гравитационная массы, может дать только опыт. Покажем, что инертная и гравитационная массы пропорциональны друг другу. Сила тяготения, действующая на тело с гравитационной массой mг,
где G – гравитационная постоянная; Mг – гравитационная масса Земли; R – расстояние между центрами материальных точек mг и Mг. C другой стороны, согласно второму закону динамики, эта сила
где Соответственно
где А = GMг/R2 = const. Экспериментально установлено, что ускорение свободного падения одинаково для всех тел. Из этого следует, что mг и mи пропорциональны друг другу. А соответствующим выбором G можно отношение mг / mи привести к единице.
Равенство инертной и гравитационной масс, экспериментально подтвержденное с относительной погрешностью 10-12, лежит в основе принципа эквивалентности гравитационных сил и сил инерции. Простейший опыт по проверке сказанного заключается в установлении равенства ускорения свободного падения для всех тел. Измерение ускорения свободного падения тел различной массы проводится на приборе Атвуда. Через ролик, смонтированный на подшипнике таким образом, чтобы он мог вращаться с возможно малым сопротивлением, проходит нитка с двумя одинаковыми грузами массой М каждый (рис.1). Система находится в равновесии. Если по одну сторону блока прибавить небольшой грузик m, то система, состоящая из больших грузов М и малого m, получит ускорение, с которым пройдет путь S1. Дополнительный груз на кольце Р отцепляется и далее грузы М пройдут путь S2 с постоянной скоростью. Полагая, что сила трения в системе, масса ролика и нити пренебрежимо малы, а нить нерастяжима, можно показать, что ускорение на участке S1
С другой стороны, считая начальную скорость равной нулю, можно записать
где v – скорость в конце движения на участке S1.
Приравняв правые части выражений (1) и (2), получим
Так как v = S2/t, где t – время движения с постоянной скоростью на участке S2, то окончательно
Видно, что, для определения g необходимо измерить время движения с постоянной скоростью на участке S2 известных масс М и m при фиксированных значениях S1 и S2.
Общий вид прибора Атвуда показан на рис.2. На вертикальной колонке 7, закрепленной на основании 9, находятся три кронштейна: неподвижный нижний кронштейн 8 и два подвижных (средний 15 и верхний 16), а также верхняя втулка 17. Основание оснащено регулируемыми ножками 10 для выравнивания положения прибора. На верхней втулке при помощи верхнего диска 4 закреплен узел подшипника ролика 5, ролик 18 и электромагнит 6. Через ролик проходит нить 14 с привязанными к ее концам грузами 3 и 12. Электромагнит после подведения к нему питающего напряжения при помощи фрикционной муфты удерживает систему ролика с грузами в состоянии покоя. Верхний и средний кронштейны можно перемещать вдоль колонки и фиксировать в любом положении, устанавливая, таким образом, длину пути равномерно-ускоренного (S1) и равномерного (S2) движений. Для облегчения измерения S1 и S2 на колонку нанесена миллиметровая шкала (13), все кронштейны имеют указатель положения, а верхний кронштейн – дополнительную черту, облегчающую точное согласование нижней грани большего груза с точкой начала движения. На среднем кронштейне закреплен кронштейн 2 и фотоэлектрический датчик 19. Кронштейн 2 снимает с падающего вниз большого груза дополнительный груз, а фотоэлектрический датчик в это время создает электрический импульс, сигнализирующий о начале равномерного движения системы грузов. Оптическая ось фотоэлектрического датчика (черта на его корпусе) находится на уровне указателя положения среднего кронштейна. Нижний кронштейн оснащен двумя кронштейнами 1 с резиновыми амортизаторами, в которые ударяют завершающие свое движение грузы. На этом кронштейне закреплен также фотоэлектрический датчик 20 с оптической осью на уровне указателя положения кронштейна. После пересечения этого уровня нижней гранью падающего груза образуется электрический сигнал о прохождении грузами определенного пути. В основании прибора находится блок 11, включающий миллисекундомер, к которому подключены фотоэлектрические датчики, а также подводится напряжение, питающее обмотку электромагнита.
Порядок выполнения работы 1. Измерить при помощи шкалы на колонке заданные пути равноускоренного (S1) и равномерного (S2) движений большого груза. 2. На правый большой груз положить один из дополнительных грузов. 3. Измерить время движения большого груза на пути S2. 4. Повторить измерения 10 раз и определить среднее значение времени движения большого груза на пути S2:
где n = 10; 5. Повторить измерения с грузами другой массы и вычислить по формуле (3) ускорение свободного падения каждого использованного груза, фиксируя результаты в табличной форме:
6. Рассчитать стандартное отклонение
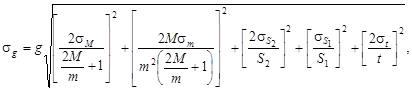
и сравнить полученное значение с приборной ошибкой. Если приборная ошибка мала, ею можно пренебречь. 7. Вычислить погрешность измерения ускорения свободного падения
где
Контрольные вопросы
1. Как отношение масс m/M влияет на погрешность в определении времени падения t? 2. Почему масса m не может быть как угодно малой? 3. Почему измеренное на данной установке ускорение свободного падения меньше, а не больше 9,8 м/с2? 4. От каких параметров зависит ускорение движения грузов на участке S1? на участке S2? Работа 3. Изучение законов механики с помощью прибора атвуда
Цель работы – экспериментально проверить законы динамики поступательного и вращательного движения, кинематические уравнения равномерного и равноускоренного движений; измерить момент инерции, силу трения и момент силы трения с помощью прибора Атвуда.
Общие сведения
Путь S и скорость v тела, движущегося прямолинейно с постоянным ускорением a без начальной скорости, изменяются со временем согласно уравнениям
Исключая из уравнений (1) время, получим связь координаты и скорости в виде
При равномерном прямолинейном движении путь, скорость и время связаны уравнением
Движение точки по окружности характеризуется угловой скоростью Основными законами динамики являются законы Ньютона. Второй закон Ньютона определяет причину изменения движения:
где
Если тело движется под действием нескольких сил, равнодействующую силу находят как векторную сумму сил:
Основное уравнение динамики вращательного движения твердого тела имеет вид
Устройство и работа прибора Атвуда описаны в работе 2. Оценим количественно движение системы грузов (рис.1) на участках S1 (равноускоренное движение) и S2 (равномерное движение). Пусть М – масса грузов 1 и 2, m – масса перегруза. Уравнение движения грузов и блока (рис.2) запишем в виде
где Т1 и Т2 – силы натяжения, создаваемые грузами 1 и 2 соответственно; R и J – радиус и момент инерции блока; Ускорения грузов а1 = а2 = а, так как нить считается нерастяжимой. Пренебрегая проскальзыванием нити по блоку, можно положить Решив систему уравнений относительно ускорения а, получим
Если допустить, что силы трения в блоке пренебрежимо малы по сравнению с mg, то Мтр/R « mg. Если пренебречь массой блока, от которой зависит момент инерции J, то J/R2 « 2M + m. Тогда
Если, наконец, масса перегруза значительно меньше масс грузов (m « 2M), то ускорение можно рассматривать как линейную функцию массы перегруза: a = mg/(2M). (4) График зависимости a = f(m), соответствующий формуле (4), представляет собой прямую, проходящую через начало координат. Справедливость упрощающих предположений, приводящих от формулы (3) к формуле (4), можно проверить экспериментально, измерив ускорение для различных масс грузов. Если график зависимости a = f(m), построенный по экспериментальным данным, будет сильно отличаться от графика, построенного по теоретической формуле (4), то это будет означать, что сделанные упрощающие предположения не совсем правильны. В этом случае можно из экспериментальных данных определить момент силы трения, силу трения и момент инерции блока. Чтобы найти силу трения Fтр, следует определить сначала момент силы
где i и k – индексы, обозначающие порядковый номер измерения. Решив эту систему относительно J и

Сила трения Fтр = где r – радиус оси блока. Чтобы определить ускорение грузов на участке S1, воспользуемся уравнением (2):
На участке S2 груз движется равномерно со скоростью
Измерения проводятся на приборе Атвуда (см. работу 2). В этом приборе имеется два одинаковых груза с массами М, соединенными нитью, перекинутой через блок. На прaвый груз добавляется перегруз массой m, после чего система приходит в равноускоренное движение и проходит путь S1. В конце этого пути перегруз автоматически снимается, и система начинает двигаться равномерно на пути S2. Результатом экспериментальной части работы должны стать значения времени t прохождения грузом 2 пути S2. К установке прилагается набор из нескольких колец (перегрузов) с разными массами m. Используя эти кольца по отдельности или в комбинации друг с другом, можно получить достаточно большой набор масс перегрузов. Порядок выполнения работы
1. Надеть на груз 2 перегруз (одно или несколько колец). 2. Измерить время t прохождения грузом пути S2. 3. Повторить измерение времени t с перегрузом той же массы не менее 5 раз. 4. Повторить пп.2 и 3 для всех остальных перегрузов. 5. Записать значения S1 и S2; оценить погрешность их определения по шкале, нанесенной на колонке прибора Атвуда. 6. Рассчитать величину ускорения для всех масс перегрузов: экспериментальное значение по формуле (7), теоретическое (aт) по формуле (4). 7. Результаты измерений и расчетов записать по форме:
8. Вывести самостоятельно формулу для расчета Da, учитывая, что а измеряется косвенно через прямые измерения t, S1 и S2, абсолютные погрешности которых известны. 9. Построить графики зависимости a = f(m) по экспериментальным данным и по теоретической формуле (4).Сравнить вид получившихся графиков и сделать вывод относительно справедливости законов механики, лежащих в основе соотношения (4). 10. Если графики сильно отличаются друг от друга (экспериментальный график не проходит через начало координат), взять две пары значений а и m (не соседние) и рассчитать момент инерции блока J, момент силы трения в блоке Мтр по формулам (5), силу трения в блоке Fтр по формуле (6). Массы грузов 1 и 2 M = (60,0±0,5) г. Контрольные вопросы
1. Каковы законы изменения во времени пути и скорости точки, движущейся равномерно и равноускоренно по прямолинейной траектории? 2. Как связаны линейная скорость и нормальное ускорение с угловой скоростью? Каково соотношение тангенциального и углового ускорений при движении точки по окружности? 3. Сформулируйте основные законы динамики поступательного и вращательного движения. 4. Какой характер имеет движение груза в приборе Атвуда на различных участках траектории? Чем определяется это различие? 5. Какой вид должна иметь кривая зависимости ускорения грузов от массы перегруза? Какой физический смысл имеют точки пересечения этой кривой с осями координат? При каких условиях кривая a(m) близка к прямой?
Основное уравнение динамики вращательного движения твердого тела
где В динамике вращательного движения различают два понятия: момент силы относительно точки и момент силы относительно оси вращения. Момент силы относительно точки О определяется как векторное произведение
где Момент силы относительно оси вращения есть проекция
где l – плечо силы, т.е. кратчайшее расстояние от оси до линии действия силы.
Момент инерции тела является мерой инертности тела при вращательном движении, подобно тому, как масса тела является мерой инертности тела при поступательном движении. Момент инерции тела зависит от распределения массы тела относительно оси вращения. Для вычисления момента инерции твердого тела относительно данной оси разобьем мысленно тело на большое число малых элементов объема dV – материальных точек (см. рисунок). Тогда момент инерции элемента объема dV относительно оси вращения ОО'
а полный момент инерции тела
где dm = rdV – масса элемента объема dV; ri – расстояние до оси вращения; r – плотность вещества в элементе объема dV. Таким образом, задача нахождения момента инерции тела относительно оси вращения сводится к интегрированию. Следует подчеркнуть, что момент инерции не зависит ни от момента внешних сил Для расчетов моментов инерции относительно произвольной оси может быть использована теорема Штейнера. Согласно ей, момент инерции J относительно произвольной оси равен сумме момента инерции тела Jc относительно оси, проходящей через центр инерции тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
В общем случае расчет момента инерции представляет собой достаточно сложную задачу, и часто он определяется экспериментально с помощью основного уравнения динамики вращательного движения, методом крутильных колебаний и др. Момент импульса материальной точки определяется как векторное произведение:
где m – масса материальной точки; Момент импульса материальной точки L = mvr. Момент импульса твердого тела, вращающегося вокруг некоторой оси,
где J – момент инерции тела; w – угловая скорость вращения. Закон сохранения момента импульса в замкнутой системе формулируется следующим образом: суммарный момент импульса всех тел замкнутой системы остается постоянным Кинетическая энергия вращающегося тела
Работа 4. определение моментов инерции параллелепипеда методом крутильных колебаний
Цель работы – определить моменты инерции прямоугольного параллелепипеда относительно трех взаимно перпендикулярных осей, проходящих через центр масс, с помощью крутильных колебаний.
Общие сведения
Пусть тело представляет собой однородный прямоугольный параллелепипед со сторонами а, b, с (см. рисунок). Моменты инерции этого тела относительно соответствующих осей
Здесь оси х, у и z проходят через центр масс перпендикулярно граням со сторонами bс, ас и аb соответственно. Если тело имеет форму куба, то a = b = c и
В данной работе момент инерции определяется методом крутильных колебаний. Если тело, висящее на нерастяжимой нити (так, что направление нити проходит через центр тяжести тела), повернуть в горизонтальной плоскости на некоторый угол a, то в результате деформации нити возникнет упругая сила. Она создаст крутящий момент (момент силы) Из теории крутильных колебаний следует, что период колебаний
где J – момент инерции. Так как D неизвестен, для его исключения из формулы (1) следует провести измерения периода колебаний с телом, момент инерции которого относительно оси вращения или легко рассчитывается, или известен. Таким телом может быть, например, куб, момент инерции которого В экспериментальной установке предусмотрена рамка для закрепления различных тел, отличающихся массой и размерами. Пусть J0, Jр, и J – моменты инерции куба, рамки и параллелепипеда относительно некоторой оси. Тогда на основании формулы (1) можно записать
где Тр – период колебаний рамки; Т0 – период колебаний рамки и куба; Т – период колебаний рамки и параллелепипеда. Исключая из уравнений (2) D и Jр, получим
Экспериментальная установка состоит из массивного основания со штативом. Кронштейны на штативе служат для закрепления стальной проволоки, на которой подвешена рамка. На среднем кронштейне закреплена стальная плита, являющаяся основанием для фотоэлектрического датчика, электромагнита и шкалы. Положение электромагнита относительно фотоэлектрического датчика указано стрелкой на шкале. Во время колебаний крутильного маятника стрела рамки прерывает световой поток, в результате чего в электронной схеме генерируются импульсы, которые после усиления подаются на электронный секундомер. Порядок выполнения работы
1. Включить установку. 2. Нажатием кнопки «ПУСК» включить электромагнит, который должен удержать рамку прибора. 3. Нажать последовательно кнопки «СБРОС» и «ПУСК», измерить время t десяти колебаний пустой рамки; вычислить период колебания Т = t/N, где N – число колебаний. 4. Повторить измерения не менее 10 раз и вычислить среднее значение t. 5. Установить в рамку куб и повторить пп.2-3 не менее 10 раз. 6. Установить в рамку параллелепипед и повторить пп.2-3 не менее 10 раз (период колебаний параллелепипеда измерить для трех взаимно перпендикулярных осей). 7. Результаты измерений оформить в виде таблицы:
8. Обработать результаты измерений. Вычислить момент инерции куба
где m – масса куба, m = 0,962 кг; а – длина ребра куба, а = 5,0 см. Зная средние значения периодов, по формуле (3) рассчитать Вычислить средние квадратические ошибки для всех измеренных периодов по формуле
где n – число измерений; Вычислить среднюю квадратическую ошибку момента инерции куба по формуле
где Рассчитать средние квадратические ошибки
где Расчеты погрешностей следует провести для всех трех моментов инерции. Окончательные результаты представить в виде
Контрольные вопросы
1. В чем заключается физический смысл момента инерции? От чего зависит момент инерции? 2. В чем сущность метода крутильных колебаний? 3. Какие параметры влияют на период колебаний крутильного маятника? 4. Почему Т и Т0 много больше Тр? 5. Как рассчитать J0? 6. Почему у параллелепипеда Jx ¹ Jy ¹ Jz,, а у куба Jx = Jy = Jz? Работа 5. Определение момента инерции с помощью маятника Обербека
Общие сведения
Маятник Обербека состоит из крестовины, на стержнях которой находятся грузы. Они могут перемещаться по стержням и закрепляться в нужном положении (см. рисунок). Крестовина с грузами насажена на вал, на котором укреплены два шкива различного радиуса. На шкив намотана нить, которая переброшена через блок. К концу нити подвешивают груз массой m, под действием силы тяжести которого система приводится в движение. На груз действует сила тяжести
где g – ускорение свободного падения; а – ускорение, с которым движется груз. Крестовина приходит во вращательное движение под действием момента силы натяжения
где J – момент инерции относительно оси вращения; e – угловое ускорение; r0 – радиус шкива. Из уравнений (1) и (2) получим
Так как угловое ускорение связано с ускорением а соотношением e = а/r0, то формула (3) принимает вид
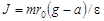
где а = 2h/t2; h – путь, пройденный грузом за время t. Таким образом, с учетом формулы (4) получим
Порядок выполнения работы 1. Убедиться, что две неподвижные рамки установлены на вертикальной линейке на расстоянии 40-50 см друг от друга. Измерить радиус шкива r0. 2. Установить грузы на стержнях на максимальном расстоянии от оси вращения и закрепить их. 3. Включить установку, нажав кнопку «ПУСК». 4. Не отпуская кнопку «ПУСК» нажать кнопку «СБРОС» и намотать нить на шкив, установив подвешенный груз на уровне верхней рамки выше оптической оси фотоэлектрического датчика. 5. Закрепить груз, нажав кнопку «ПУСК» и обнулить счетчик нажатием кнопки «СБРОС». 6. Опустить груз, отключив электромагнит нажатием кнопки «ПУСК», измерить время t его движения до оптической оси нижней рамки. Взять не менее трех отсчетов t и вычислить 7. Сместить грузы на стержнях на два деления к центру и повторить пп.4-6, измерить расстояние r от оси вращения до центра масс груза. 8. Повторить измерения для 8-10 положений грузов. 9. Записать результаты экспериментов в табличной форме:
Экспериментальные значения момента инерции Jэ рассчитать по формуле (5). 10. Обработать результаты измерений. Из теоретических соображений следует, что момент инерции крестовины с четырьмя грузами массой
где J0 – момент инерции крестовины без грузов. Из формулы (6) следует, что J = f(r2). Следовательно, если построить график этой функции, то должна получиться прямая, продолжение которой будет пересекать ось ординат в некоторой точке, соответствующей J0. Такое построение можно сделать приближенно, «на глаз». Однако математические методы обработки результатов наблюдений позволяют сделать такое построение достаточно точным. Легче всего сделать это с помощью метода наименьших квадратов. Суть этого метода состоит в том, что из всех возможных прямых линий надо взять такую, для которой сумма квадратов отклонений каждой точки от прямой будет наименьшей. Для удобства перепишем формулу (6) в виде
где r2 = х и
где Обработку результатов эксперимента удобно вести в табличной форме:
Рассчитав J0 и K по формулам (8), следует построить зависимость Jрот x по формуле (7). Так как через две точки можно провести только одну прямую, то для построения этой прямой можно взять какие-нибудь две удобные точки. Далее по формуле (7) рассчитать момент инерции Jp для каждого опыта, заполняя последний столбец (см. п.9). Среднее квадратическое отклонение
11. По данным опыта и расчетов построить график функции в координатах J – r2, предварительно обработав данные опыта методом наименьших квадратов, и вычислить доверительный интервал измерения момента инерции в границах
Контрольные вопросы
1. Что такое момент инерции? От чего он зависит? Как можно рассчитать момент инерции относительно оси вращения? 2. Каков физический смысл основного уравнения динамики вращательного движения? Что такое момент силы? 3. Как выглядит график зависимости момента инерции в координатах J – r2 и J – r? Почему результаты опыта лучше обрабатывать в координатах J – r2? 4. Почему график зависимости J = f(r2) не проходит через начало координат? Какой смысл имеет величина J0? 5. Какой смысл имеет тангенс угла наклона графика к горизонтальной оси? Работа 6. определение момента инерции твердых тел с помощью маятника максвелла
Цель работы – изучить устройство маятника Максвелла и определить с его помощью момент инерции твердых тел.
Общие сведения
Маятник Максвелла представляет собой однородный диск С, через центр которого проходит металлический стержень D (рис.1). К концам этого стержня прикреплены две нити. Они тщательно, виток к витку, наматываются на стержень в направлении от его конца к диску. При освобождении маятника возникает поступательное движение вниз и вращательное вокруг оси симметрии. Вращение, продолжаясь по инерции в низшей точке движения (когда нити уже размотаны), приводит вновь к наматыванию нити на стержень, диск поднимается, и движение снова повторяется, т.е. возникают колебания.
Выведем расчетную формулу для момента инерции маятника на основе закона сохранения энергии. Когда маятник поднят на высоту h, его полная энергия состоит только из потенциальной энергии Eп = mgh. В наинизшем положении маятника Eп = 0, а полная энергия равна сумме кинетических энергий поступательного и вращательного движений:
Из закона сохранения энергии следует, что полная энергия маятника в верхнем и нижнем положениях должна быть одинакова, т.е.
Отсюда момент инерции
Поскольку поступательное движение маятника возникает только за счет вращательного, то угловая (w) и линейная (v) скорости связаны соотношением
Подставив уравнение (2) в (1), получим
Для равнопеременного движения связь между h, v и t может быть записана в виде
Подставив выражение для v в формулу (3), получим окончательно
Формулу (4) можно было бы вывести и на основе уравнений динамики для поступательного и вращательного движения.
В основании 1 установки (рис.2) закреплена колонка 8, к которой прикреплен неподвижно верхний кронштейн 9 и подвижный нижний кронштейн 7. На верхнем кронштейне находится электромагнит 10 и фотоэлектрический датчик 11, а на нижнем кронштейне – фотоэлектронный датчик 3. Маятник представляет собой диск 5, закрепленный на оси 6, подвешенной на двух нитях 4 (бифилярный подвес). На диск можно насаживать сменные кольца 12, изменяя таким образом момент инерции системы. Маятник удерживается в верхнем положении электромагнитом 10. Фотоэлектрические датчики 3 и 11 соединены с электронным секундомером 2. Верхний электронный датчик задает момент начала движения маятника, а нижний – момент окончания движения (опускания) маятника. Порядок выполнения работы
1. Надеть на диск маятника одно из колец (если оно не надето). 2. Включить установку. Нижний край кольца маятника должен быть примерно на 2 мм ниже оптической оси фотоэлектрического датчика, ось маятника должна быть горизонтальной. 3. Намотать на ось маятника нить подвески до фиксации маятника в верхнем положении электромагнитом. 4. Измерить время падения маятника по прибору. 5. Повторить пп.3-4 еще 10 раз. 6. Провести измерения с другими кольцами. 7. По измеренным значениям времени определить среднее значение времени падения маятника
8. По шкале на вертикальной колонке прибора измерить длину маятника h. 9. Измерить радиусы оси (Rо), диска (Rд) и колец (Rк). 10. Записать массы оси (mо), диска (mд) и колец (mк), вычислить общую массу маятника
11. Обработать результаты эксперимента. Вычислить экспериментальное и теоретическое значение момента инерции маятника
где Jо – момент инерции оси маятника, Для полученного экспериментально значения момента инерции вычислить среднюю квадратическую погрешность
Погрешность измерения времени st определить по результатам измерений (st = Dt), погрешность массы sm принять равной 1 г, погрешности sh и 12. Записать окончательный результат в форме Контрольные вопросы
1. Что такое момент инерции материальной точки? 2. Что такое момент инерции твердого тела? 3. От чего зависит величина момента инерции твердого тела? 4. Каков принцип действия маятника Максвелла? 5. Какие силы вызывают поступательное движение маятника? 6. Момент каких сил вызывает вращательное движение маятника? 7. Вывести формулу для определения момента инерции с помощью маятника Максвелла. Работа 7. измерение скорости полета пули с помощью баллистического маятника
Цель работы – определить скорость полета пули с помощью крутильных колебаний баллистического маятника.
Общие сведения
Скорость полета пули может достигать значительной величины, поэтому ее прямое измерение, т.е. определение времени, за которое пуля проходит известное расстояние, требует специальной аппаратуры. Разработаны и косвенные измерения скорости полета пули. Можно, например, использовать явление неупругого соударения.
Если летящая пуля испытывает неупругий удар с неподвижным телом большей массы, их скорость после удара будет существенно меньше первоначальной скорости пули и ее можно будет измерить достаточно простыми методами, например, с помощью крутильных колебаний баллистического маятника, представляющего собой два стержня 1, подвешенных на вертикально натянутой проволоке 3 (рис.1). На стержнях закреплены мисочки с пластилином 2 и перемещаемые грузы 4. При попадании пули в мисочку с пластилином, маятник начинает поворачиваться вокруг своей вертикальной оси. Если пренебречь силами трения можно воспользоваться законами сохранения. На основании закона сохранения момента импульса можно написать
где m – масса пули; v – ее скорость; l – расстояние от оси вращения маятника до точки удара пули; w – угловая скорость маятника; J – момент инерции маятника. Согласно закону сохранения механической энергии при повороте кинетическая энергия маятника переходит в потенциальную энергию закручивающейся проволоки:
где Из уравнений (1) и (2) можно получить
Так как момент инерции пули
Тогда скорость пули
Модуль кручения проволоки D определим, измерив период крутильных колебаний маятника Т. Так как при малых углах отклонения
Подставив выражение (5) в уравнение (4), найдем
Для определения J измерим периоды колебаний маятника Т1 и Т2 при различных положениях грузов. Из формулы (5) следует
Момент инерции маятника
где М – масса одного неподвижного груза; R – расстояние от центра масс груза до оси вращения; J0 – момент инерции маятника без грузов. Для различных положений грузов, т.е. различных расстояниях от центра масс груза до оси вращения R1 и R2:
откуда
Решая систему уравнений (7) и (8), найдем
|
 . Определить среднюю абсолютную Dd и среднюю квадратическую sd погрешности измерения диаметра по формулам (3) и (4) соответственно;
. Определить среднюю абсолютную Dd и среднюю квадратическую sd погрешности измерения диаметра по формулам (3) и (4) соответственно;
 ;
; );
); и
и 
 ,
,
 – инертная масса;
– инертная масса;  – ускорение свободного падения.
– ускорение свободного падения. ,
,


 . (1)
. (1) , (2)
, (2) .
. . (3)
. (3)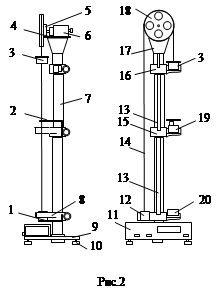
 ,
, – результат i-го измерения.
– результат i-го измерения.

 = sm = 0,01 г;
= sm = 0,01 г;  =
=  = ±1 мм; st £ 10-3 с.
= ±1 мм; st £ 10-3 с. . (1)
. (1) . (2)
. (2) .
. , угловым ускорением
, угловым ускорением  , а также тангенциальным
, а также тангенциальным  и нормальным
и нормальным  ускорениями. Линейная скорость v связана с угловой соотношением v = wR, а тангенциальное и угловое ускорения – соотношением аt = eR.
ускорениями. Линейная скорость v связана с угловой соотношением v = wR, а тангенциальное и угловое ускорения – соотношением аt = eR. ,
, – сила, вызывающая движение тела; m – масса тела;
– сила, вызывающая движение тела; m – масса тела;  – ускорение тела.
– ускорение тела.
 .
. ,
, где
где  – результирующий момент сил,
– результирующий момент сил,  ; r – плечо силы, т.е. кратчайшее расстояние от оси до линии действия силы; J – момент инерции тела относительно оси вращения; e – угловое ускорение.
; r – плечо силы, т.е. кратчайшее расстояние от оси до линии действия силы; J – момент инерции тела относительно оси вращения; e – угловое ускорение. ;
; ;
; ,
, – момент силы трения, действующей на ось блока.
– момент силы трения, действующей на ось блока.
 (3)
(3) .
. . Для этого запишем выражение (3), содержащее неизвестные J и
. Для этого запишем выражение (3), содержащее неизвестные J и 


 .
. , следовательно,
, следовательно, . (7)
. (7)




 ,
, ,
, – радиус-вектор, проведенный из точки О в точку приложения силы.
– радиус-вектор, проведенный из точки О в точку приложения силы. ,
,
 ,
, ,
,
 ,
, – ее скорость;
– ее скорость;  ,
, .
. .
. ;
; ;
; .
. .
.
 (здесь D – модуль кручения нити подвеса), возвращающий систему в исходное состояние. В результате возникнут крутильные колебания.
(здесь D – модуль кручения нити подвеса), возвращающий систему в исходное состояние. В результате возникнут крутильные колебания. . (1)
. (1) .
. (2)
(2) . (3)
. (3)


 ,
,  и
и  .
.
 – среднее значение соответствующего периода колебаний;
– среднее значение соответствующего периода колебаний;  – значение периода в i-м опыте.
– значение периода в i-м опыте.
 – ошибка при измерении массы,
– ошибка при измерении массы,  – приборная ошибка,
– приборная ошибка,  для моментов инерции параллелепипеда относительно осей х, у, z. Так как Т » Тр и Т0 » Тр, то формулу для вычисления погрешности можно записать в виде
для моментов инерции параллелепипеда относительно осей х, у, z. Так как Т » Тр и Т0 » Тр, то формулу для вычисления погрешности можно записать в виде ,
, – средние квадратические ошибки.
– средние квадратические ошибки.

 .
. Цель работы – исследовать зависимость момента инерции крестовины с грузами от распределения массы относительно оси вращения, проходящей через центр масс.
Цель работы – исследовать зависимость момента инерции крестовины с грузами от распределения массы относительно оси вращения, проходящей через центр масс. и сила натяжения
и сила натяжения  (1)
(1)
 . (3)
. (3) , (4)
, (4) . (5)
. (5) .
.
 , если считать грузы материальными точками, можно выразить формулой
, если считать грузы материальными точками, можно выразить формулой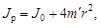 (6)
(6) , (7)
, (7) = K. Согласно методу
= K. Согласно методу (8)
(8) ; N – число опытов; Ji – экспериментальное значение момента инерции Jэ, полученное для каждого опыта.
; N – число опытов; Ji – экспериментальное значение момента инерции Jэ, полученное для каждого опыта.




 .
. .
.
 .
. .
. (1)
(1) . (2)
. (2) . (3)
. (3) .
. . (4)
. (4)
 . Результаты измерений и вычислений зафиксировать в табличной форме:
. Результаты измерений и вычислений зафиксировать в табличной форме: ;
;  ,
, ; Jк – момент инерции кольца, надетого на диск,
; Jк – момент инерции кольца, надетого на диск,  ; Jд – момент инерции диска,
; Jд – момент инерции диска,  ; Rд и Rк – радиусы диска и кольца соответственно.
; Rд и Rк – радиусы диска и кольца соответственно. .
. оценить по цене деления используемых измерительных приборов.
оценить по цене деления используемых измерительных приборов. , сравнить экспериментальное значение J с теоретическим Jт.
, сравнить экспериментальное значение J с теоретическим Jт.
 , (1)
, (1) , (2)
, (2) – наибольший угол поворота маятника; D – модуль кручения проволоки.
– наибольший угол поворота маятника; D – модуль кручения проволоки. . (3)
. (3) существенно меньше момента инерции маятника J, то выражение (3) можно привести к виду
существенно меньше момента инерции маятника J, то выражение (3) можно привести к виду
 . (4)
. (4) , то
, то . (5)
. (5) . (6)
. (6) . (7)
. (7) ,
,
 . (8)
. (8)