|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Принцип действия преобразователя частоты
Система привода с переменной скоростью вращения состоит из двигателя и преобразователя частоты. Исторически для регулирования скорости вращения использовали двигатели постоянного тока. Преобразователь в данном случае регулировал только напряжение, был прост и дешев, но двигатели постоянного тока имеют сложную конструкцию, критичный в эксплуатации щеточный аппарат и дороги. Асинхронные двигатели широко распространены, надежны, имеют относительно невысокую стоимость, хорошие эксплуатационные качества. В связи с бурным развитием электроники и появлением сложных преобразователей частоты на силовых транзисторах, стало возможно регулировать скорость вращения асинхронных двигателей. Для понимания алгоритма работы преобразователя частоты сначала необходимо рассмотреть принципы действия асинхронного двигателя. Асинхронный двигатель по принципу действия подобен трансформатору. После подключения трехфазной обмотки статора к трехфазной сети образуется вращающееся с частотой сети магнитное поле.
Рис 6.1 - Принцип асинхронного двигателя
Магнитный поток, создаваемый током статора (см. рис. 6.1) пересекает воздушный зазор и индуцирует токи в роторе. Поскольку поле вращения ротора отстает от статора возникает момент вращения и ротор поворачивается. Если обмотки статора разделены на несколько пар полюсов, то частота вращающегося поля будет меньше, чем частота сети (2 полюса - 3000об/мин, а 4 полюса - 1500об/мин). Если частота вращения поля статора и ротора совпадут, то вращения ротора происходить не будет (принцип асинхронного двигателя ). Разность между скоростью вращения статора и ротора называется скольжением. В среднем у двигателей общего назначения оно составляет 3…10%, у специальных двигателей работающих с сильно инерционной нагрузкой - 25…30%, а иногда и 45%.
Рис 6.2 - Механическая характеристика асинхронного двигателя
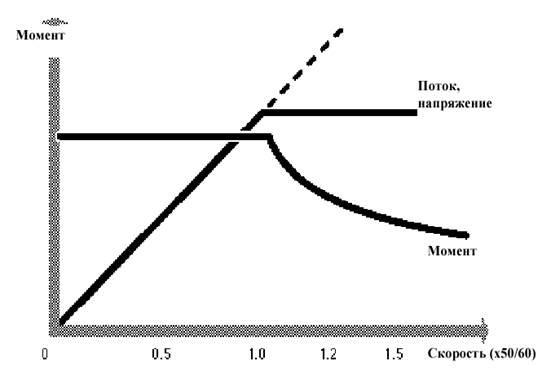
Скорость двигателя зависит от частоты питающего напряжения. Поэтому для управления частотой вращения ротора двигателя преобразователь частоты изменяет частоту выдаваемого напряжения (см. рис. 6.2). При уменьшении частоты управляющего сигнала необходимо уменьшать его напряжение, иначе ток статора и магнитный поток будут слишком сильными, сердечник ротора будет перенасыщен. При увеличении частоты выше номинальной (см. рис. 6.3) требуется также увеличивать подаваемое напряжение для поддержания необходимого момента. Величина напряжения физически ограничена и при более высоких частотах оно не поднимается выше определенного максимального уровня, следовательно, на частотах выше номинальных двигатель обеспечивает момент вращения ниже номинального. Для управления асинхронным двигателем переменного тока преобразователь частоты контролирует и изменяет частоту и напряжение подаваемые на обмотки.
Рис 6.3 - Ограничение крутящего момента при увеличении скорости выше номинальной
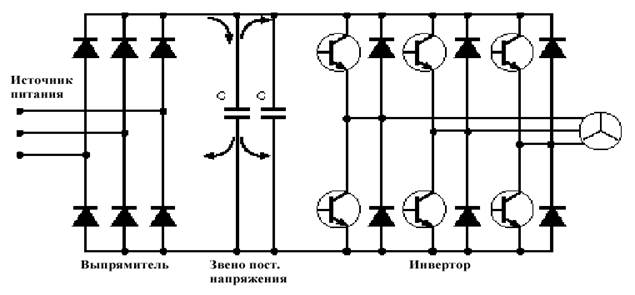
Принцип работы преобразователя частоты или, как часто его называют – инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT транзисторов с диодами, включенными антипараллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающем при работе с обмотками двигателя (см. рис. 6.4).
Рис 6.4 - Структурная схема преобразователя частоты Преобразователи частоты серий Micromaster Eco и Midimaster Eco предназначены для управления трехфазными двигателями. Используя специальный алгоритм управления: открывая и закрывая перекрестные пары транзисторов, формируют последовательность импульсов напряжения разной скважности - это называется широтно-импульсная модуляция (ШИМ) в фазах двигателя. При этом ток в фазах двигателя приобретает форму синусоид, сдвинутых во времени, что достаточно для формирования вращающегося магнитного поля и вращения двигателя. Регулируя частоту напряжения и амплитуду сигнала, мы можем менять скорость вращения двигателя. Графическое представление ШИМ: n = (60 x f)/p, где n - скорость вращения двигателя, об/мин; f - выходная частота преобразователя частоты, она же входная для двигателя, Гц; p – число пар полюсов двигателя. Например, для двигателя с 4-мя полюсами при 50Гц скорость вращения 1500об/мин, а тот же двигатель с преобразователем на частоте 25Гц будет вращаться со скоростью около 750об /мин. Номинальные обороты двигателя написаны на табличке на двигателе. Скорость около 3000 - двигатель 2-х полюсный. Скорость около 1500 - двигатель 4-х полюсный. Скорость около 1000 - двигатель 6-и полюсный.
Рис 6.5 - График широтно-импульсной модуляции
Как упоминалось выше, данные преобразователи частоты являются преобразователями 4-го поколения.
Поиск по сайту: |