|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
ЭЛЕКТРОПРИВОД С НИЗКОСКОРОСТНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
Как правило, при использовании обычных электродвигателей между ними и исполнительным органом рабочей машины необходима установка механической передачи, понижающей скорость двигателя до требуемого уровня. Наличие механической передачи снижает надежность работы электропривода, увеличивает его массу, габариты и стоимость, создает дополнительный шум при работе. В связи с этим заманчивым является использование таких электродвигателей, которые имеют низкую угловую скорость вала и не требуют применения понижающей механической передачи. К таким двигателям относятся волновые двигатели и двигатели с катящимся ротором, принцип действия которых кратко изложен далее. Более подробно они рассмотрены в [1, 3]. а) Волновые электродвигатели В электродвигателях общепромышленного и специального назначения нашли применение так называемые волновые передачи (волновые редукторы), которые характеризуются значительным передаточным отношением (до 100 на одну ступень), небольшими массой и габаритом, высокой точностью, надежностью и долговечностью в работе. Волновой двигатель сочетает в себе эти специфические свойства волновой передачи и электрической машины, что достигнуто их конструктивным объединением. Основными достоинствами волнового двигателя являются низкая угловая скорость вала и высокое быстродействие. Масса и габариты электропривода при использовании волнового двигателя оказываются меньше, чем у привода, выполненного по обычной схеме двигатель–редуктор. Рассмотрим принцип действия волнового двигателя, обратившись к рис. 6.10. Главная особенность двигателя заключается в конструкции ротора 1, который представляет собой гибкий цилиндр, способный деформироваться в радиальном направлении. На внешней поверхности ротора крепится гибкий зубчатый венец 2. На статоре двигателя 3, который по своей конструкции не отличается от статора обычных двигателей переменного тока, крепится жесткий зубчатый венец 4. Венцы ротора и статора образуют обычную волновую передачу.
Если подключить обмотку статора (на рис. 6.10 они не показаны) к сети переменного тока, то в зазоре появится вращающееся магнитное поле с синусоидальным распределением магнитной индукции Вd (рис. 6.10, б). На ферромагнитный ротор начнет действовать сила магнитного притяжения Fм,п, которая пропорциональна квадрату магнитной индукции (штриховая линия на рис. 6.10, б). В результате действия силы Fм,п ротор деформируется (рис. 6.10, в) и его зубчатый венец входит в зацепление с зубчатым венцом статора в двух диаметрально противоположных точках окружности статора. При вращении поля статора синхронно вращается и волна деформации ротора, в результате чего зубчатый венец ротора обкатывает зубчатый венец статора. Так как венцы статора и ротора изготавливаются с различным числом зубцов zc и zp, то при обкатывании ротора его вал совершает еще и медленное вращение вокруг своей оси, которое и является главным выходным движением волнового двигателя. Скорость этого движения определяется по следующей формуле
Уменьшая разность между числами зубцов статора и ротора, можно получить низкие угловые скорости вала волнового двигателя. По своим характеристикам рассмотренный волновой двигатель является реактивным СД (волновой двигатель может быть и индукторного типа). Действительно, ось деформации гибкого ротора вращается синхронно с осью магнитного поля, а скорость двигателя постоянна и находится в фиксированном отношении (6.6) со скоростью вращения магнитного поля w0. При нагружении двигателя внешним моментом сопротивления происходит изменение взаимного положения осей поля статора и деформаций ротора и двигатель начинает развивать синхронизирующий момент, как обычный реактивный СД. Этот момент уравновешивает приложенный момент нагрузки, и вал двигателя продолжает вращаться со скоростью (и при наличии некоторого пространственного сдвига между осями ротора и поля статора. Отметим, что вращающееся магнитное поле двигателя выполняет по существу роль электромагнитного генератора механических волн деформации, необходимого для работы обычной волновой передачи. Широкое применение волновых двигателей ограничивается сложностью конструкции и технологии изготовления эластичного ротора. Из за сравнительно невысоких энергетических показателей нецелесообразно изготовление и применение волновых двигателей на средние и большие мощности. б) Двигатели с катящимся ротором Принцип действия двигателей с катящимся ротором (ДКР) можно пояснить с помощью рис. 6.11. На рисунке внешнее заштрихованное кольцо 1 представляет собой статор ДКР, выполняемый по аналогии со статором машины переменного тока. Внутри статора располагается гладкий ферромагнитный ротор 2, ось которого 02 не совпадает с осью статора 01. Это несовпадение осей статора и ротора – эксцентриситет – является важным отличительным признаком ДКР, на котором основывается принцип его действия.
Предположим, что в воздушном зазоре создано вращающееся магнитное поле, имеющее резко выраженный максимум магнитной индукции, что обычно достигается за счет подмагничивания ДКР постоянным магнитным потоком. Если в рассматриваемый момент времени (рис. 6.11, а) этот максимум совпадает с точкой А, то ферромагнитный ротор под действием силы магнитного притяжения Fм,п займет положение, показанное на рис. 6.11, а. Это положение ротора будет равновесным, так как направление силы Fм,п проходит через точку А касания статора и ротора. Рассмотрим теперь другой момент времени, когда вращающееся магнитное поле повернулось против часовой стрелки на некоторый угол. Сила магнитного притяжения, совпадающая по направлению с максимумом индукции магнитного поля, также изменит свое направление и займет положение, показанное на рис. 6.11, б. Так как направление силы Fм,п уже не проходит через точку касания статора и ротора, то на последний начнет действовать вращательный момент относительно точки А. Под действием этого момента ротор начнет перекатываться по поверхности статора, стремясь вновь занять равновесное положение. При непрерывном вращении магнитного поля ротор будет непрерывно перекатываться по поверхности статора вслед за максимумом индукции этого поля. При таком обкатывании ось ротора 02 будет вращаться вокруг оси статора 01 со скоростью вращения магнитного поля, а сам ротор будет вращаться вокруг собственной оси в противоположную сторону со скоростью, во много раз меньше скорости вращения магнитного поля. Из рис. 6.11, в видно, что за полный оборот магнитного поля ротор из-за разности длин окружности качения статора Lc и ротора Lp повернется в противоположном направлении на угол aр, который как центральный угол может быть рассчитан по формуле
где Dc, Dp ‑ диаметры статора и ротора. Переходя в (6.7) от углов к скоростям, получаем
где wр – угловая скорость вала ДКР. Выполняя ротор с диаметром, близким к диаметру статора, можно получить весьма малые отношения (Dc–Dp)/Dp и тем самым малые скорости вала ДКР. Коэффициент редукции скорости, определяемый обратным соотношением Dp/(Dс–Dp), для ДКР может достигать 1500, что является наиболее ценным свойством ДКР. Кроме того, ДКР обладает высоким быстродействием – время его разбега и реверса составляет сотые доли секунды. При торможении ДКР отключением переменного напряжения статора он за счет постоянного подмагничивания развивает тормозной момент, вследствие чего время и путь его торможения малы, а ротор фиксируется силой магнитного притяжения в конечном положении. Достоинствами ДКР являются также большой пусковой момент и относительно небольшой пусковой ток, а также отсутствие в большинстве конструкций скользящих электрических контактов и высокоскоростных подшипников. Сравнительно высокими являются и энергетические показатели работы ДКР, которые улучшаются по мере роста их мощности.
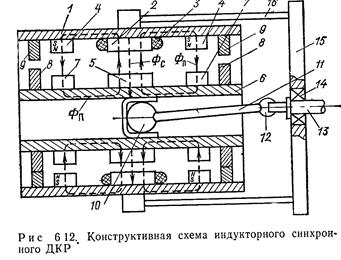
Вместе с тем ДКР имеют и заметные недостатки. К ним в первую очередь относятся сложность конструкции самого ДКР и необходимость применения специальных механических устройств для передачи несоосного вращения ротора. К ним относятся, например, передачи Кардана, Сешерона и Ольстома. Кроме того, работа ДКР сопровождается шумом и вибрациями, возникающими за счет действия центробежных сил при вращении ротора. Для примера рассмотрим конструкцию индукторного синхронного ДКР, показанную на рис. 6.12. В корпусе 1 закреплены сердечник статора 2 с обмоткой 3 и постоянные магниты 4. Обмотка статора 3 создает симметричное вращающееся магнитное поле Фс, а постоянные магниты 4 – радиально направленное и неподвижное в пространстве магнитное поле Фп. В результате сложения этих полей образуется вращающееся магнитное поле с резко выраженным максимумом магнитной индукции, которое перемещается вдоль окружности статора (вращается) со скоростью w0. Сердечник 5 ротора набирается из листов электротехнической стали и не имеет обмоток. Он монтируется на полой ферромагнитной втулке 6, которая служит одновременно магнитопроводом для потока Фп постоянного подмагничивания. На этой же втулке крепятся и кольцевые сердечники 7, являющиеся частью магнитопровода для потока Фп. Особенность конструкции рассматриваемого ДКР заключается в наличии на роторе специальных катков 8, которые при вращении ротора обкатываются по специальным направляющим статора 9. Их наружный диаметр несколько больше диаметра ротора, что устраняет его непосредственное соприкосновение со статором и тем самым их износ. Внутри полой втулки 6 располагается механизм передачи несоосного вращения ротора – карданная передача. Эта передача включает в себя карданный шарнир 10, который с помощью карданного вала 11 соединяется с другим карданным шарниром 12. Выходной вал 13 двигателя вращается в подшипнике 14, размещенном во фланце 15. Этот фланец в совокупности с упругими стержнями 16 образует так называемую эластичную подвеску, которая позволяет снизить вибрацию приводимого в движение исполнительного органа. На основе рассмотренной конструкции могут быть реализованы также ДКР с электромагнитным возбуждением и с зубчатыми поверхностями качения. В первом случае постоянные магниты 4 заменяются электромагнитами, обмотка возбуждения которых включается на напряжение постоянного тока. Для реализации зубчатого зацепления статора и ротора гладкие обкатываемые поверхности заменяются зубчатой передачей. Двигатели с катящимся ротором в настоящее время нашли применение в электроприводах дозаторов, часовых механизмов, манипуляторов, станков, электродов дуговых электрических печей, системах телеметрического управления. Они изготовляются на мощности от нескольких ватт до нескольких киловатт.
Поиск по сайту: |

 (6.6)
(6.6)
 (6.7)
(6.7) (6.8)
(6.8)