|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМСтр 1 из 4Следующая ⇒
Глава пятая 5.1. СХЕМА ВКЛЮЧЕНИЯ, СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И РЕЖИМЫ РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ Синхронные трехфазные двигатели (СД) широко применяются в электроприводах самых разнообразных рабочих машин и механизмов, что объясняется их высокими технико-экономическими показателями. 1. Синхронные двигатели имеют высокий коэффициент мощности cosj, равный единице для электроприводов небольшой мощности и опережающий cosj в установках большой мощности. Способность СД работать с опережающим cosj и отдавать в сеть реактивную мощность позволяет улучшать режим работы и экономичность сети электроснабжения. 2. Высокий КПД современных СД, составляющий 96–98 %, что на 1–1,5 % выше КПД АД тех же габаритов и скорости. 3. Возможность регулирования перегрузочной способности СД за счет регулирования тока возбуждения и меньшая зависимость этого показателя от напряжения сети по сравнению с АД. 4. Синхронный двигатель обладает абсолютно жесткой механической характеристикой. 5. Важным преимуществом конструкции СД является большой воздушный зазор, вследствие чего его характеристики и свойства мало зависят от износа подшипников и неточности монтажа ротора. 6. Возможность их изготовления на очень большие мощности (до нескольких десятков мегаватт и более). На рис. 5.1 приведена схема включения СД. На статоре СД, выполненном аналогично статору АД, располагается трехфазная обмотка, подключенная к сети переменного тока.
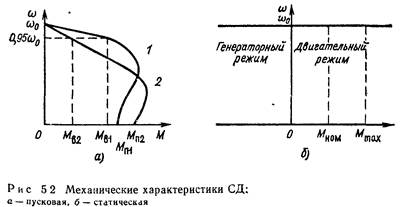
Ротор СД выполняется с двумя обмотками: обмоткой возбуждения постоянного тока и короткозамкнутой пусковой обмоткой в виде беличьей клетки. Пусковая обмотка обеспечивает механическую характеристику СД в виде одной из кривых, показанных на рис. 5.2, а. Характеристика 1 обеспечивает по сравнению с характеристикой 2 больший «входной» момент СД (Mв1>Mв2), но меньший пусковой момент (Mп1<Mп2). Выбор вида пусковой механической характеристики определяется конкретными условиями работы СД. После вхождения СД в синхронизм его скорость при изменениях момента нагрузки на валу до некоторого максимального значения Мmax остается постоянной и равной угловой скорости магнитного поля (синхронной скорости)
где р – число пар полюсов СД; f1 – частота питающей сети. Поэтому его механическая характеристика имеет вид горизонтальной прямой линии, показанной на рис. 5.2, б. Если момент нагрузки превысит значение Мmax, то СД может выпасть из синхронизма. Для определения максимального момента СД Мmax, до которого сохраняется синхронная работа СД с сетью, служит угловая характеристика СД. Она отражает зависимость момента М от внутреннего угла СД Q, представляющего собой угол сдвига между ЭДС статора Е и напряжением сети Uф или, что то же самое, между осью магнитного поля СД и осью его полюсов. Получим угловую характеристику для неявнополюсного СД при пренебрежении активным сопротивлением обмотки статора (R1=0). Векторная диаграмма для этого случая показана на рис. 5.3, а, где обозначено: x1 – индуктивное сопротивление фазы обмотки статора; I –ток статора СД.
Подводимая к СД мощность может быть принята равной электромагнитной мощности
где Uф – фазное напряжение сети; j – угол сдвига между напряжением сети и током СД. Отсюда
Из векторной диаграммы рис. 5.3, а следует
Рассмотрение треугольника АВС позволяет определить, что
с учетом чего (5.4) запишется как
Подстановка (5.6) в (5.3) дает следующее выражение:
где Mmax=3UфЕ/(w0x1) – максимальный момент СД. Из выражения (5.7) видно что момент СД представляет собой синусоидальную функцию внутреннего угла машины. Полученное выражение угловой характеристики (5.7) может быть с погрешностью примерно 10–20 % использовано и для явнополюсных СД. Угловая характеристика СД показана на рис. 5.3, б. Максимального значения момент СД достигает при Q=p/2. Эта величина характеризует собой перегрузочную способность СД. При больших значениях угла СД выпадает из синхронизма, а при меньших углах Q его работа устойчива. Важной величиной является номинальный угол сдвига Qном, его значение равно 25–30°, которому соответствует номинальный момент Mном. При таком значении Qном lм=Мmax/Mном=2¸2,5. Синхронный двигатель может работать во всех основных энергетических режимах, а именно: двигательном и генераторном при параллельной и последовательной работе с сетью и независимо от сети. При этом режим генератора последовательно с сетью (торможение противовключением) используется редко из-за того, что перевод СД в этот режим сопровождается значительными бросками тока и требует применения сложных схем управления. Для осуществления торможения СД чаще используется генераторный режим при работе независимо от сети переменного тока (режим динамического торможения). Для реализации этого режима обмотка статора СД отключается от сети и замыкается на дополнительный резистор R1д, как показано на рис. 5.4, а, обмотка возбуждения продолжает питаться от источника, постоянного тока.
Механические характеристики СД в этой схеме подобны характеристикам АД при динамическом торможении. При изменении R1д и тока возбуждения Iв получаются различные искусственные характеристики СД.
Поиск по сайту: |
 (5.1)
(5.1)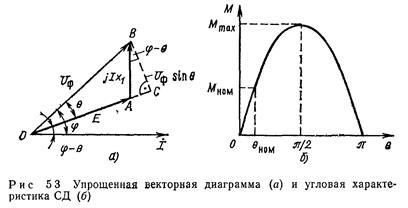
 (5.2)
(5.2) (5.3)
(5.3) (5.4)
(5.4) (5.5)
(5.5) (5.6)
(5.6) (5.7.)
(5.7.)