|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
РЕГУЛИРОВАНИЕ СКОРОСТИ ДПТ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ В СХЕМЕ С ШУНТИРОВАНИЕМ ЯКОРЯ
Для регулирования скорости ДПТ независимого возбуждения применяется схема с шунтированием якоря, показанная на рис. 3.30. Эта схема позволяет с помощью двух добавочных резисторов–Rш, включаемого параллельно якорю, и Rп, включаемого последовательно с якорем, получать
сравнительно жесткие характеристики в области малых скоростей ДПТ. Такие характеристики требуются, например, для электроприводов подъемных кранов и лифтов. Уравнения характеристик ДПТ в схеме рис. 3.30 могут быть получены на основании выражений для ЭДС (3.2) и момента (3.3) ДПТ и следующих соотношений:
Заменяя в (3.57) и (3.58) ток Iп на его выражение из (3.59), а затем исключая из полученных двух уравнений Iш, получаем следующие выражения соответственно для электромеханической и механической характеристик:
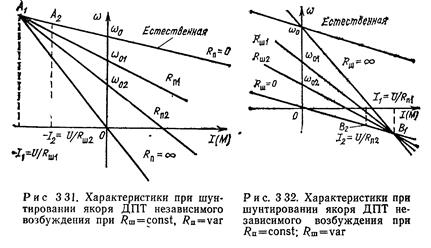
где Из (3.60) и (3.61) видно, что в схеме с шунтированием якоря снижается скорость идеального холостого хода и падает жесткость характеристик по сравнению с основной схемой включения ДПТ. Это объясняется тем, что в схеме рис 3.30 напряжение ДПТ меньше напряжения источника питания, а в якорной цепи находится добавочный резистор Rп. По этой причине способ регулирования скорости в схеме с шунтированием якоря часто называют комбинированным, так как он сочетает в себе регулирование изменением напряжения и реостатное регулирование. Семейство искусственных характеристик ДПТ в схеме рис. 3.30 при постоянном Rш и регулируемом Rп приведено на рис. 3.31.
Общая для данного Rш точка A1 пересечения всех характеристик соответствует режиму работы ДПТ, когда он не потребляет ток из сети, в силу чего резистор Rп не оказывает влияния на характеристики ДПТ. В этой точке ЭДС ДПТ уравновешивает напряжение сети и внутреннее падение напряжения в якоре, т. е.
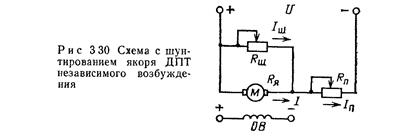
Двигатель работает в режиме динамического торможения с током I1=U/Rш1. При изменении Rш, например при его увеличении, общей точкой становится точка A2, также располагающаяся на естественной характеристике. Семейство искусственных характеристик ДПТ при постоянном Rп и регулируемом Rш приведено на рис. 3.32. Пересечение характеристик происходит в точке В1, которая является общей точкой для всех искусственных характеристик при данном Rп. В точке B1 ЭДС ДПТ, изменив свой знак, компенсирует внутреннее падение напряжения в якоре, вследствие чего напряжение на якоре и, следовательно, на Rш равно нулю, ток через резистор Rш. не проходит, а ток через якорь определяется как I1=U/Rп1. При изменении Rп, например при его увеличении, общей точкой характеристик становится точка В2, координата тока для которой определяется соотношением I2=U/Rп2. Рассмотренный способ регулирования скорости по своим характеристикам и показателям занимает промежуточное положение между способами, связанными с изменением напряжения на якоре и сопротивлением в цепи якоря. Диапазон регулирования скорости лежит в пределах 5 – 6, плавность регулирования определяется плавностью изменения сопротивления Rш и Rп. Регулирование скорости осуществляется вниз от основной при постоянном моменте нагрузки, жесткость получаемых искусственных характеристик относительно высокая в области малых скоростей. Экономичность этого способа регулирования невысока из-за значительных потерь мощности в якорной цепи. По этой причине способ используется для регулирования скорости ДПТ небольшой мощности при кратковременной работе на пониженных скоростях.
Поиск по сайту: |
 (3.57)
(3.57) (3.58)
(3.58) (3.59)
(3.59) (3.60)
(3.60) (3.61)
(3.61)