|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Лабораторна робота № 6. ДОСЛІДЖЕННЯ ВПЛИВУ НА РОБОТУ САР ДИЗЕЛЬ-ГЕНЕРАТОРА ДОДАТКОВОГО СИГНАЛУ ПО НАВАНТАЖЕННЮ НА ГЕНЕРАТОР ⇐ ПредыдущаяСтр 10 из 10
Мета роботи: дослідження впливу на роботу САР частоти обертання вала ДВЗ наявності та параметрів додаткового сигналу по навантаженню, яке діє на ДВЗ.
1.Опис роботи САР. Принципову схему САР частоти обертання вала ДВЗ ДГ наведено на рис. 6.1. Система автоматичного регулювання частоти обертання ДВЗ описана в лабораторній роботі №2. В цій роботі приводяться доповнення, що впливають на дію жорсткого зворотного зв’язку 12 (рис.6.1) та сигналу по навантаженню з виходу електромагнітного приводу ЕП. Система включає об’єкт регулювання –дизель, автоматичний регулятор з жорстким або гнучким зворотнім зв’язком та допоміжний сигнал за величиною навантаження. Згідно з класифікацією така система називається комбінованою. Наявність зворотного зв’язку при двосторонньо діючому виконавчому механізмі робить САР статичною або астатичною в залежності від ступеня відкриття дроселя 16, САР, що працює за відхиленням, а при включенні допоміжного сигналу за величиною навантаження – комбінованою. Комбіновані системи використовують як один із засобів реалізації інваріантної системи. Такі системи більш складні, але дозволяють суттєво покращити якість перехідного процесу регулювання. Згідно з іншими ознаками в класифікації, приведена система є електрогідравлічною, багатоконтурною, безперервною, лінеаризованою, а також, як уже згадувалося вище, працює за принципом відхилення з додатковим сигналом по збуджуючій дії з боку навантаження, яке створює електричний генератор (ЕГ), тобто є комбінованою.
Рис.6.1. Принципова схема САР частоти обертання дизель-генератора з додатковим сигналом по навантаженню
До складу регулятора входять: пристрій, що вимірює – відцентровий датчик обертів вала ДВЗ 1, золотниковий підсилювач, до складу якого входять плунжер – золотник 2 і гільза золотника 3, поршневий двосторонній виконавчий механізм 18, важільний механізм 20, орган, що регулює – рейка паливного насоса 21, пристрій від’ємного зворотного зв’язку 11 – 17, важіль зворотного зв’язку 12, випрямляч В, електромагнітний привід ЕП, що включає котушку 7, плунжер 8, важільну передачу 9, пристрій, що задає, який складається із пружини, що задає 5 і пристрою – гвинт-гайка 10 для зміни стискування пружини 5. Пристрій зворотного зв’язку – пристрій ізодрому, включає в себе важіль 12, пружину 13, поршень 14, обвідний (байпасний) канал 15, дросельний клапан 16, пристрій для зміни коефіцієнта передачі зворотного зв’язку 11. Об’єкт регулювання ДВЗ приводить в дію електричний генератор ЕГ, вироблена енергія підводиться до навантаження Н (до користувачів енергії). Задана частота обертання nзд встановлюється попереднім стискуванням пружини 5 за допомогою пристрою 10 (гвинт-гайка в даному випадку). Вхідними координатами являються задаюча дія nзд, збурююча дія N, що створюється навантаженням Н, яке включено в мережу електрогенератора ЕГ. Генератор приводиться в дію дизелем. На усталеному режимі зусилля, що здійснює пружина 5 врівноважується зусиллям з боку відцентрового датчика 1, а виконавчий механізм 18 і регулюючий орган (рейка паливного насоса) 21 підтримують витрату палива , до дизеля, постійною. При зміні частоти обертання n ця рівновага порушується і регулятор змінює витрату палива доти не буде встановлено задану частоту обертання. Наприклад, при зменшенні n в результаті зростання навантаження Н, зусилля, що розвиває відцентровий датчик також зменшиться, золотник 2 під дією пружини 5 переміститься вгору. Отвори 19 в гільзі золотника 3 відкриються таким чином, що верхня порожнина поршня виконавчого механізму 18 з’єднається з магістраллю високого тиску робочої рідини, а нижня – з магістраллю низького тиску, і поршень під дією різниці тисків зміститься вниз, важільна передача перемістить регулюючий орган 21 і витрата палива зросте. По закінченню перехідного процесу регулювання буде встановлено витрату палива таку, що відповідає новому навантаженню, при якому частота обертання рівна заданій (в астатичній системі). Розглянемо вплив на роботу системи зворотного зв’язку та додаткового сигналу за дією, що збурює. Дія зворотного зв’язку поліпшує якість роботи системи і залежить від параметрів налагодження. Пристрій зворотного зв’язку має два параметри налагодження – коефіцієнт передачі Якщо дросель 16 знаходиться в закритому положенні і вважати, що протоків рідини не має, а рідина не стискувана, то поршень 14 і циліндр 17 будуть переміщуватись як одне ціле, то це буде випадок застосування жорсткого зворотного зв’язку. Тобто реалізується П-закон. При повністю відкритому дроселі 16 і коли пружина 13 має таку жорсткість, що втримує циліндр 17 на місці, а поршень 14 переміщується вільно і переміщує робочу рідину із однієї порожнини в іншу через обвідний канал 15 і дросель 16. В цьому випадку гільза 3 золотникового підсилювача залишається нерухомою і зворотний зв’язок відсутній, як це було при І-законі роботи регулятора. В третьому випадку, коли дросель 16 відкритий частково, на перехідних режимах будуть рухатись і поршень 14 і циліндр 17. Буде і взаємний рух поршня відносно циліндра, а в усталеному режимі, коли поршень виконавчого механізму 18 займе положення відповідне навантаженню, циліндр 17 і гільза 3 кожного разу за допомогою пружини 13 будуть займати одне й теж саме положення в статиці, як це було при І-законі роботи регулятора, що дає змогу реалізувати астатичну систему. Як ми бачимо – в перехідному режимі зворотній зв’язок діє і реалізується пропорційний закон, а в усталеному – не діє і реалізується інтегральний закон. Таким чином ми маємо ПІ-закон, що дає змогу одержати високу якість перехідного процесу регулювання без залишкового відхилення. Конкретні установлені значення параметрів Пристрій для подачі додаткового сигналу (ПДС) за дією, що збурює (навантаженню) включає електромагнітний привід ЕП, до якого входять гвинт, що задає 4 з пружиною 6, котушка 7, плунжер 8 і важільна передача 9. Дія, що збурює – навантаження, що створюється на валу дизель-генератора оцінюється за величиною потужності. Так як напруга постійна, то за величиною струму I, що через випрямляч В підводиться до котушки 7 електромагнітного приводу ЕП, плунжер 8 приводиться в дію і, через важільну передачу 9, змінює натяг пружини 5, що задає. Величина дії ЕП може бути змінена пристроєм, що налагоджує – гвинтом 4 і пружиною 6. При зростанні струму в навантаженні частота обертів вала ДГ зменшується, а сила дії електромагнітного приводу ЕП зростає, плунжер 8 втягується в котушку 7 на більшу відстань і через важільну передачу більше здавлює пружину 5, золотник 2 підіймається вгору і дає команду виконавчому механізму 18 переміщує регулюючий орган 21 і збільшує витрату палива G, а отже і частоту обертів вала n. В результаті чого можливий такий випадок, що n при зміні навантаження не буде змінюватись в статиці і менше змінюватись в динаміці. В такому випадку і при роботі САР з пропорційним регулятором не буде остаточного відхилення регульованої величини n, тобто буде з допомогою комбінованої системи реалізовано астатичну систему. Щоб цього досягти необхідно вірно розрахувати і встановити параметри пристрою додаткового сигналу ПДС (рис.6.1). Для цього використовують пристрій, що корегує КП, який на структурній схемі (рис.6.3) позначено через Wк(s) – це передаточна функція ПДС – пристрою, що корегує. Для цього необхідно мати математичний опис і передаточні функції всіх елементів системи.
2.Математичний опис окремих елементів САР. Функціональна схема САР приведена на рис.6.2.
Рис.6.2. Функціональна схема САР частоти обертання вала дизель-генератора з додатковим сигналом по навантаженню: ЗД – пристрій, що задає; ПЕ – порівнювальний елемент; ЗП – золотниковий підсилювач; ВМ – виконавчий механізм; ПЗЗ – пристрій зворотного зв’язку; ВП –важільна передача ; ПДС – пристрій додаткового сигналу; ВД – відцентровий датчик; ДГ – дизель-генератор; ЕГ – електрогенератор
Рівняння елементів системи, що записані в відносних відхиленнях мають вигляд: - рівняння ДГ, як об’єкта регулювання
- рівняння відцентрового датчика
- рівняння золотникового підсилювача, елемента порівняння, пристрою, що задає і важільної передачі:
- рівняння виконавчого механізму:
Рівняння пристрою зворотного зв’язку, в залежності від положення дроселя 16, може бути таким: а) дросель повністю відкрито: hзз=0; б) дросель повністю закрито: hзз=kззhвм ; в) дросель частково відкрито: В рівняннях прийняті позначення: T0 – постійна часу об’єкта регулювання (ДГ); Ti – час ізодрому (постійна часу пристрою зворотного зв’язку); n, h, N, hзд, hзп, hвм, hзз, Gзп, Pвд, Pзд – відносні відхилення від базових значень частоти обертання вала, переміщення рейки паливного насоса, потужності користувача, затяжки пружини, що задає, переміщення золотника золотникового підсилювача, переміщення штоку виконавчого механізму і пристрою зворотного зв’язку, витрати робочої рідини (масла) через вікна (отвори) золотникового підсилювача, зусилля, що розвивають грузи відцентрового датчика і пружина пристрою, що задає. 3.Структурна схема САР частоти обертання вала ДВЗ. Структурна схема САР частоти обертання вала ДВЗ приведена на рис.6.3. На схемі прийняті позначення передаточних функцій: Wзп(s), Wвм(s), Wрп (s), Wвд(s), W0h (s), W0N(s), Wзз(s), Wк(s) – золотникового підсилювача, виконавчого механізму, регулюючого органу, відцентрового датчика, об’єкта регулювання по каналам дій, що регулюють та збурюють, пристрою зворотного зв’язку, пристрою сигналу, що доповнює (пристрою, що корегує). На основі структурної схеми (рис.6.3) одержимо передаточну функцію пристрою, що корегує в загальному вигляді. Для цього запишемо передаточну функцію замкненої САР по каналу дії, що збурює:
Для того, щоб САР була інваріантною по каналу дії, що збурює N, потрібно виконання умови:
звідки передаточна функція пристрою, що корегує рівна:
Рис.6.3. Структурна схема САР частоти обертання вала ДВЗ
Для випадку, коли дросель пристрою зворотного зв’язку 16 повністю закрито, тобто реалізується жорсткий місцевий зворотній зв’язок, передаточні функції елементів, що входять в вираз (5.1), з урахуванням рівнянь елементів, мають вигляд:
  
Вираз (5.1) з врахуванням (5.2) запишеться так:
За умови, що
Враховуючи те, що пристрій сигналу, що доповнює конструктивно є електромагнітним приводом з важільною передачею на виході, то структурно його можна представити підсилювальною ланкою з передаточною функцією:
Коефіцієнт передачі пристрою, що корегує відповідно до (5.3) дорівнює:
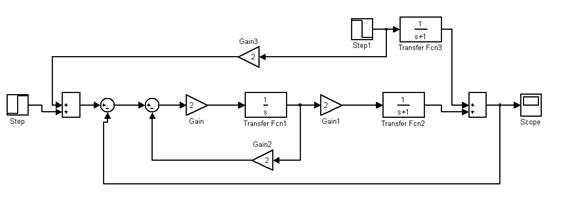
Коли потрібно мати пристрій, що корегує з більш складним законом роботи, його можна отримати з допомогою додатково включених елементів. В загальному випадку, коли при корекції систем автоматичного управління необхідно визначити який пристрій потрібний і як його включити, звертаються до спеціального розділу теорії “Синтез САР”. Для виконання лабораторної роботи, потрібно підрахувати kк, набрати згідно до рис.6.4 структурну схему на ПК і одержати перехідний процес регулювання для значення kк одержаного по (5.5) і для значень більшого та меншого від отриманого kк в два рази. Чисельні значення коефіцієнтів рівнянь елементів регулятора і об’єкта приведені в табл.2.1 та 6.1. Схему набору моделі САР частоти обертання вала ДВЗ, при наявності додаткового сигналу по навантаженню у Simulink наведено на рис.6.4.
Рис.6.4. Схема набору моделі САР частоти обертання вала ДВЗ при наявності додаткового сигналу по навантаженню у Simulink
Поиск по сайту: |

 та час ізодрому Ti, які можна змінювати гвинтовою парою 11 та величиною відкриття дроселя 16 відповідно.
та час ізодрому Ti, які можна змінювати гвинтовою парою 11 та величиною відкриття дроселя 16 відповідно.


 .
.
 , kN, kn, kзд, kзп, kро, kвм, kзз – коефіцієнти передачі ДГ за діями, що керують та збурюють, відцентрового датчика, пристрою, що задає, золотникового підсилювача, важільної передачі, виконавчого механізму, пристрою зворотного зв’язку;
, kN, kn, kзд, kзп, kро, kвм, kзз – коефіцієнти передачі ДГ за діями, що керують та збурюють, відцентрового датчика, пристрою, що задає, золотникового підсилювача, важільної передачі, виконавчого механізму, пристрою зворотного зв’язку;
 ,
, (5.1)
(5.1)




 , отримаємо:
, отримаємо: (5.3)
(5.3) (5.4)
(5.4) ; (5.5)
; (5.5)